Data Formats
RoboDriver uses a per-sample storage format so each lifecycle stage can pick the most suitable layout.
Across the full RoboDriver + RoboXStudio stack, data is stored differently per stage:
- Collection stage: data stays on the robot or peripheral device. Because device state and operator habits vary, per-sample storage is more robust. Images are stored as individual frames to avoid video encoding overhead.
- Upload stage: images are encoded into video.
- Cloud stage: data remains per-sample while labeling and cleaning are performed.
- Release stage: per-sample data is merged into multi-sample bundles, including
episode merge,machine merge, andtask merge. All merge operations require data from the same robot model. The merged data can be exported to multiple formats, with extendedLeRobot Dataset v2.1as the default.
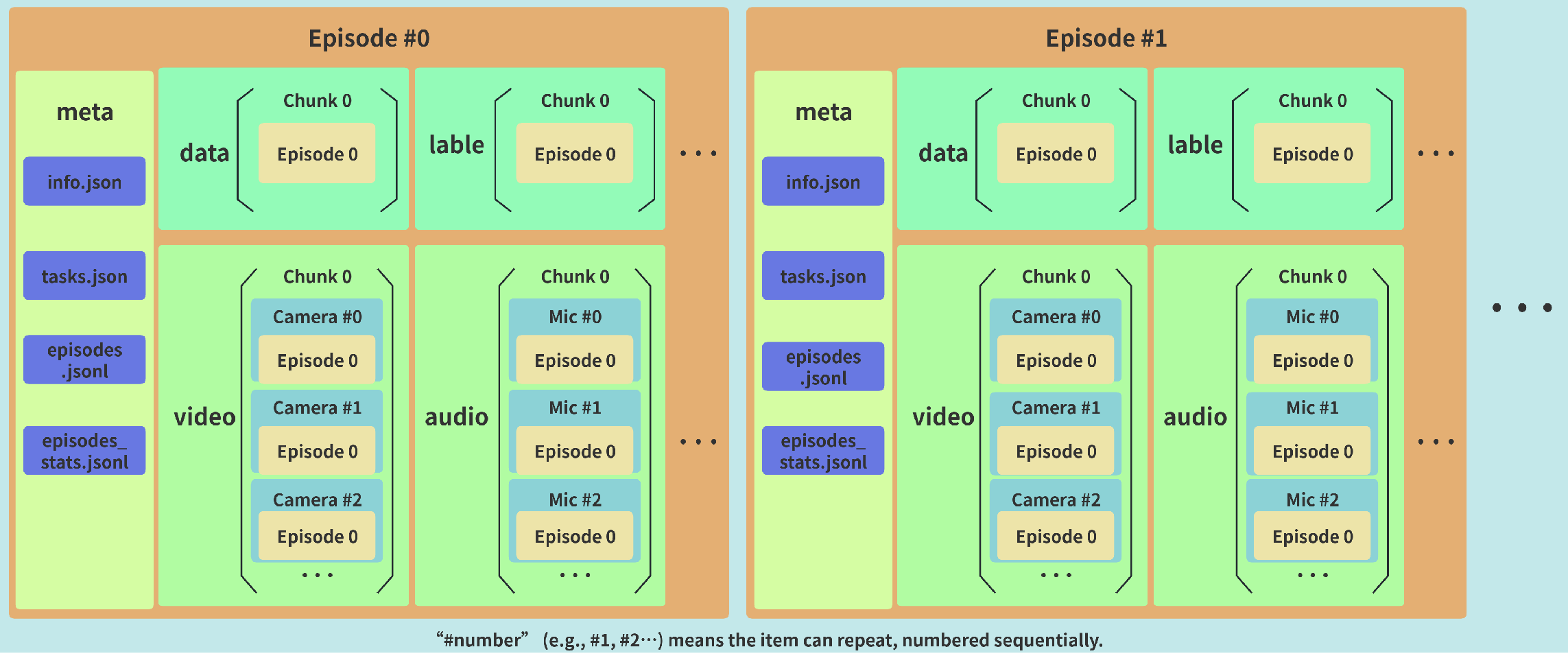
Default: LeRobot Dataset v2.1
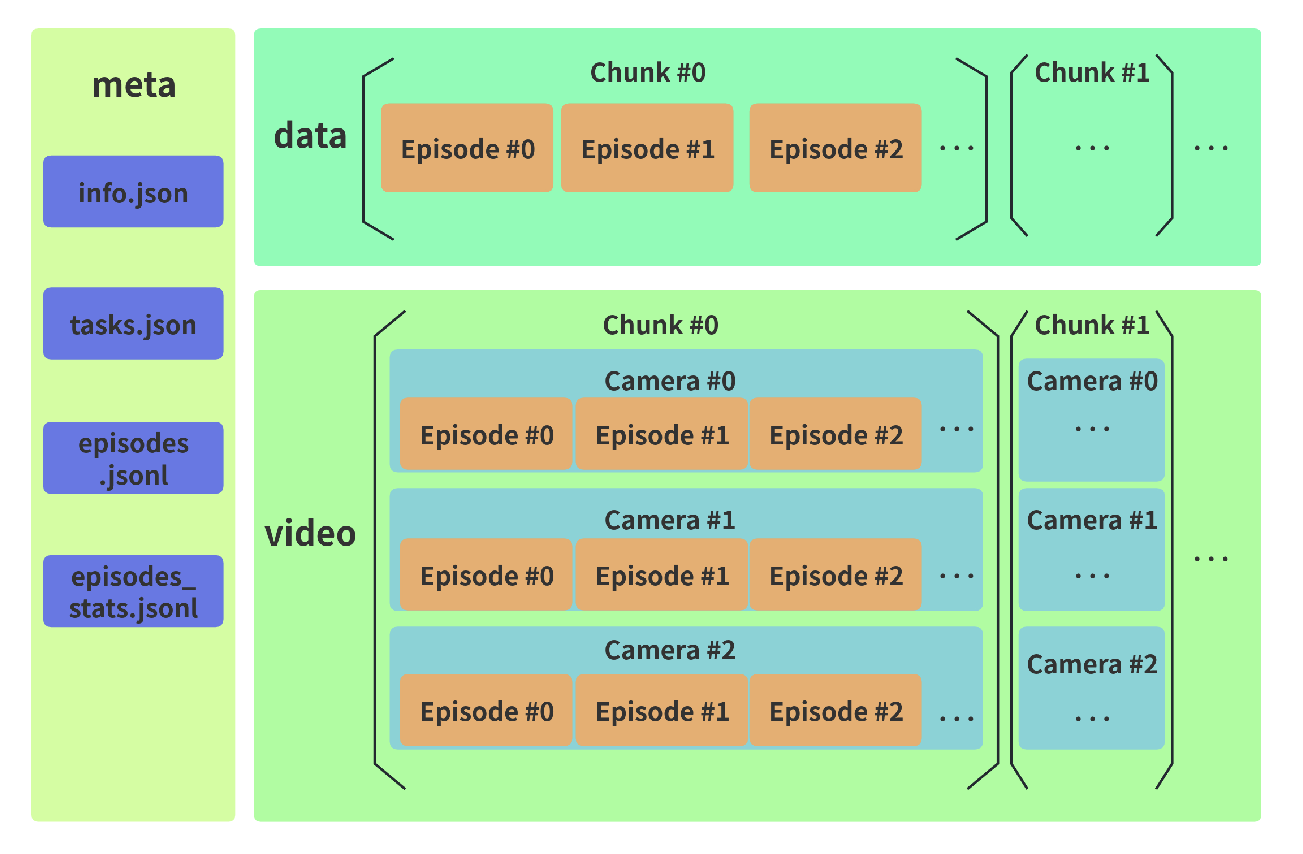
CoRobot Dataset v2.1
See the FlagOpen/RoboCOIN repository for details.
RoboDriver Format